Skip to content
Skip to content 
The program takes as input:
- the initial resting configuration of the cube object (which has a known geometry), represented by a frame attached to the center of the object
- the desired final resting configuration of the cube object
- the actual initial configuration of the youBot (given by a 13-vector)
- the initial configuration
of the reference trajectory for the end-effector frame of the youBot

The output of the program is:
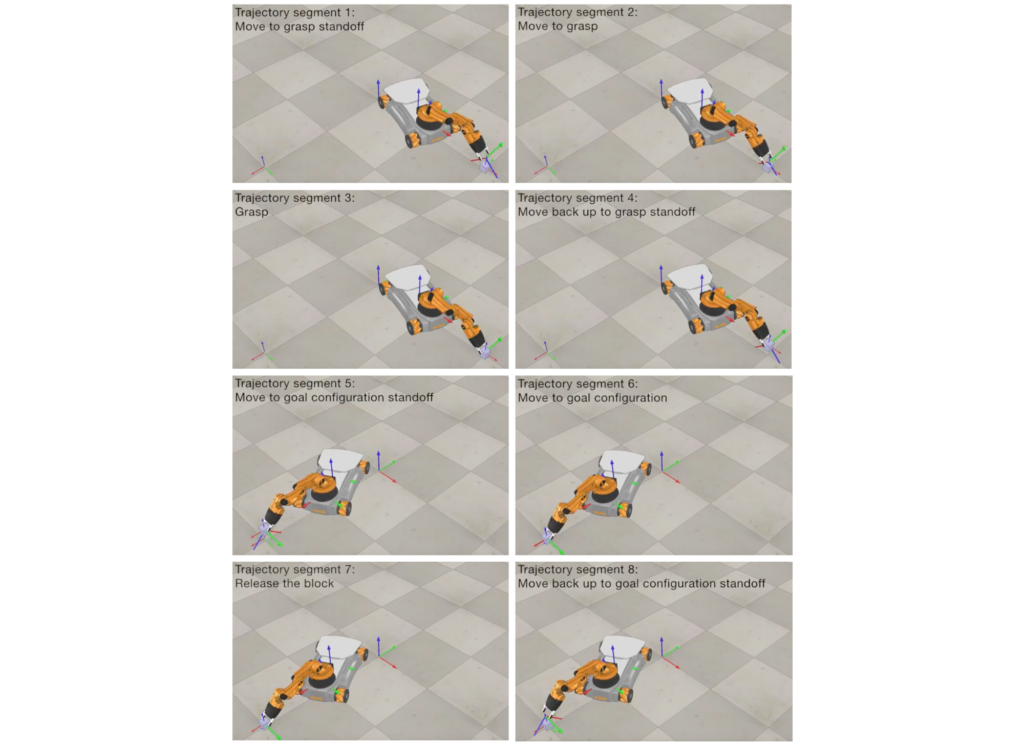
- a csv file which, when “played” through the CoppeliaSim scene, drives the youBot to successfully pick up the block and put it down at the desired location
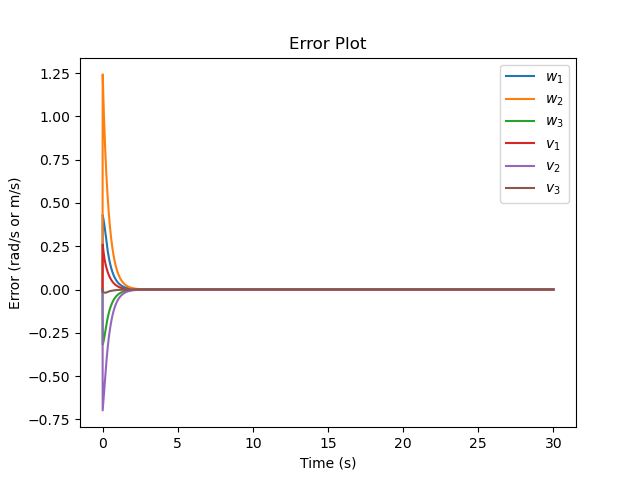
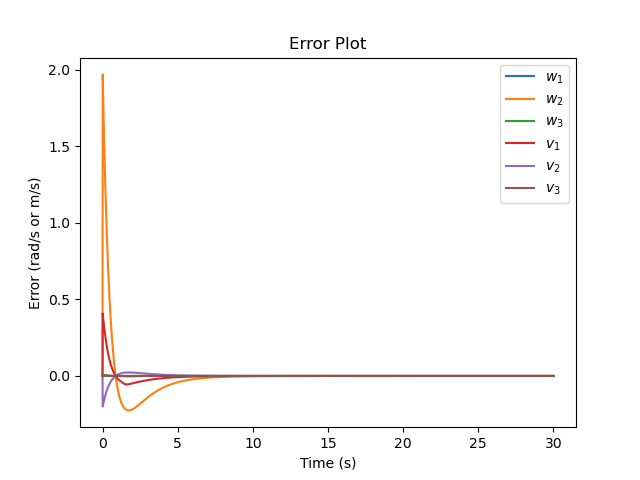
- a data file containing the 6-vector end-effector error (the twist that would take the end-effector to the reference end-effector configuration in unit time) as a function of time
The configuration of the robot at time \(t\) is represented as a thirteen vector: $$q = \begin{bmatrix} \phi_{chassis} \\
x_{chassis} \\
y_{chassis} \\
J_1 \\
J_2 \\
J_3 \\
J_4 \\
J_5 \\
W_1 \\
W_2 \\
W_3 \\
W_4 \\
\text{gripper state} \end{bmatrix}$$
where \( \phi_{chassis},
x_{chassis},
y_{chassis}\) represent the chassis pose, \(J_1\) to \(J_5\) are the arm joint angles, \(W_1\) to \(W_4\) are the four wheel angles and gripper state {0 or 1} indicates whether the gripper is open or closed.