While I was getting my undergraduate degree at Manipal Institute of Technology in Mechanical Engineering, I was part of a student robotics team called “Mars Rover Manipal”. The team, comprised of 40 students spanning 8 disciplines of Engineering, designs and builds prototype Mars Rovers to compete in the University Rover Challenge, an annual robotics competition held at the Mars Desert Research Station in Utah, USA. I led the Mechanical and Manufacturing subdivision of the team, where I managed a team of 7 people responsible for the rover’s mechanical design, manufacturing, and maintenance.
To learn more about the Rover’s abilities and the competition challenges, check out the team’s System Acceptance Review (SAR) submission for the 2022 edition of the University Rover Challenge (URC) down below.
Mars Rover Manipal’s System Acceptance Review for the University Rover Challenge 2022
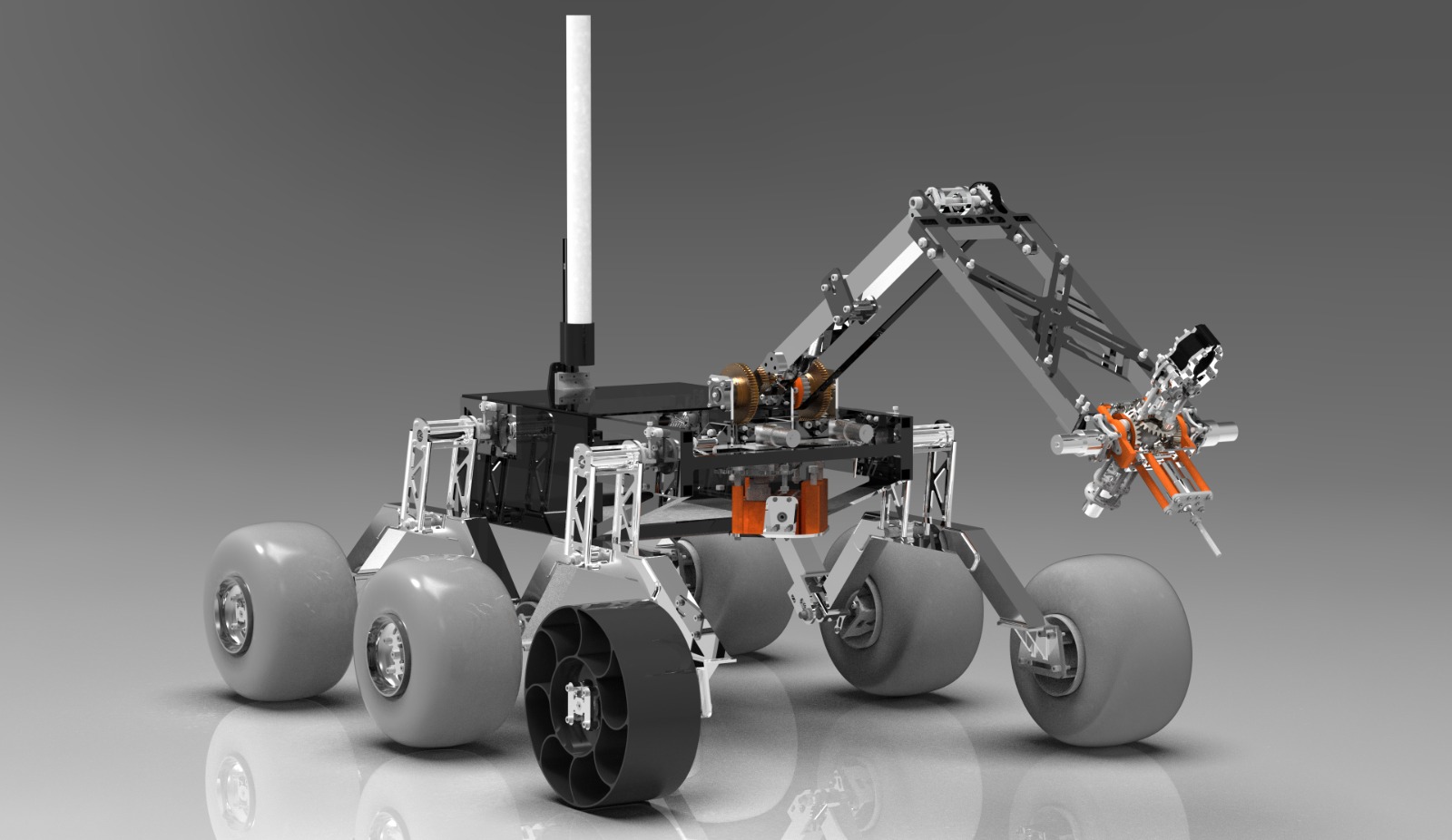
URC'22 Competition Rover
The Rover carrying a payload weighing 5 kgs for the Equipment Servicing Mission
The Mars Rover features a 6 DOF Robotic Arm for manipulating objects in the environment and a differentially steered drive system for navigating the tough Martian terrain. The rover clocks in at a little under 50 kgs, with either the arm or the soil collection module on board, depending on the competition task.
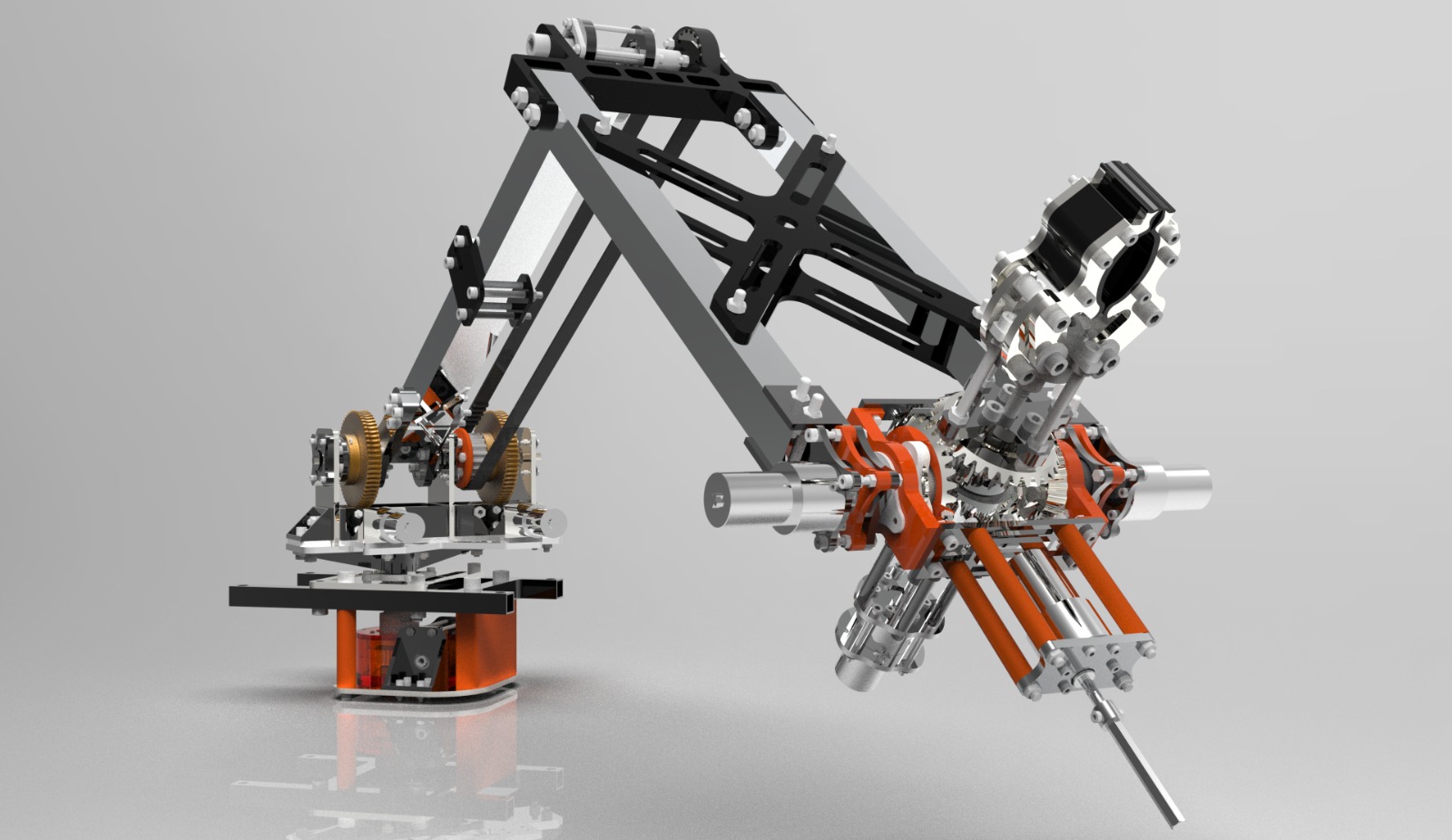
6 DOF Articulated Robotic Arm
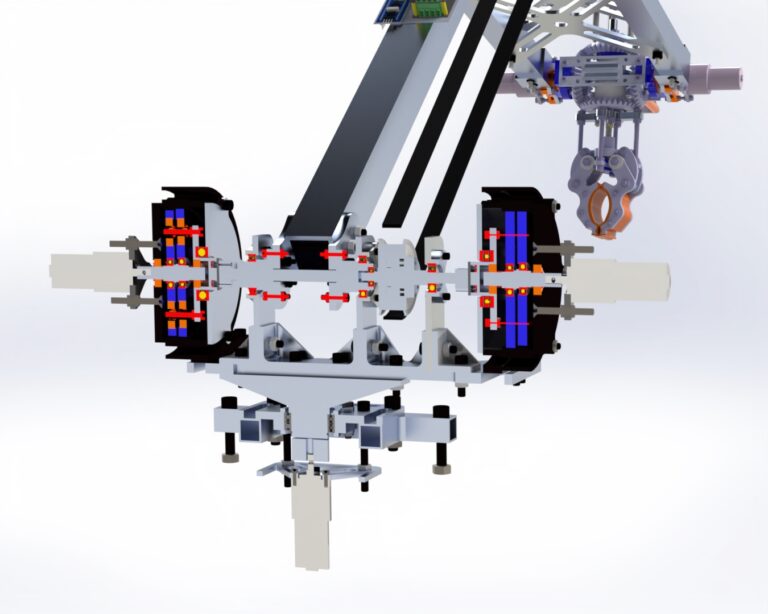
Sectional View of the Base Coaxial Joint Assembly
Robotic Arm Specifications:
6 DOF Articulated type Robotic Manipulator
3 DOF end effector (Bevel gear cage differential mechanism).
Payload – 5kgs
Vertical Reach – 1.2m
Power transmission to the second rotational joint is achieved through the help of a timing belt.
Gear reducers for the first and second pitch axes are located at the base to reduce mass moment of inertia (increases stiffness).
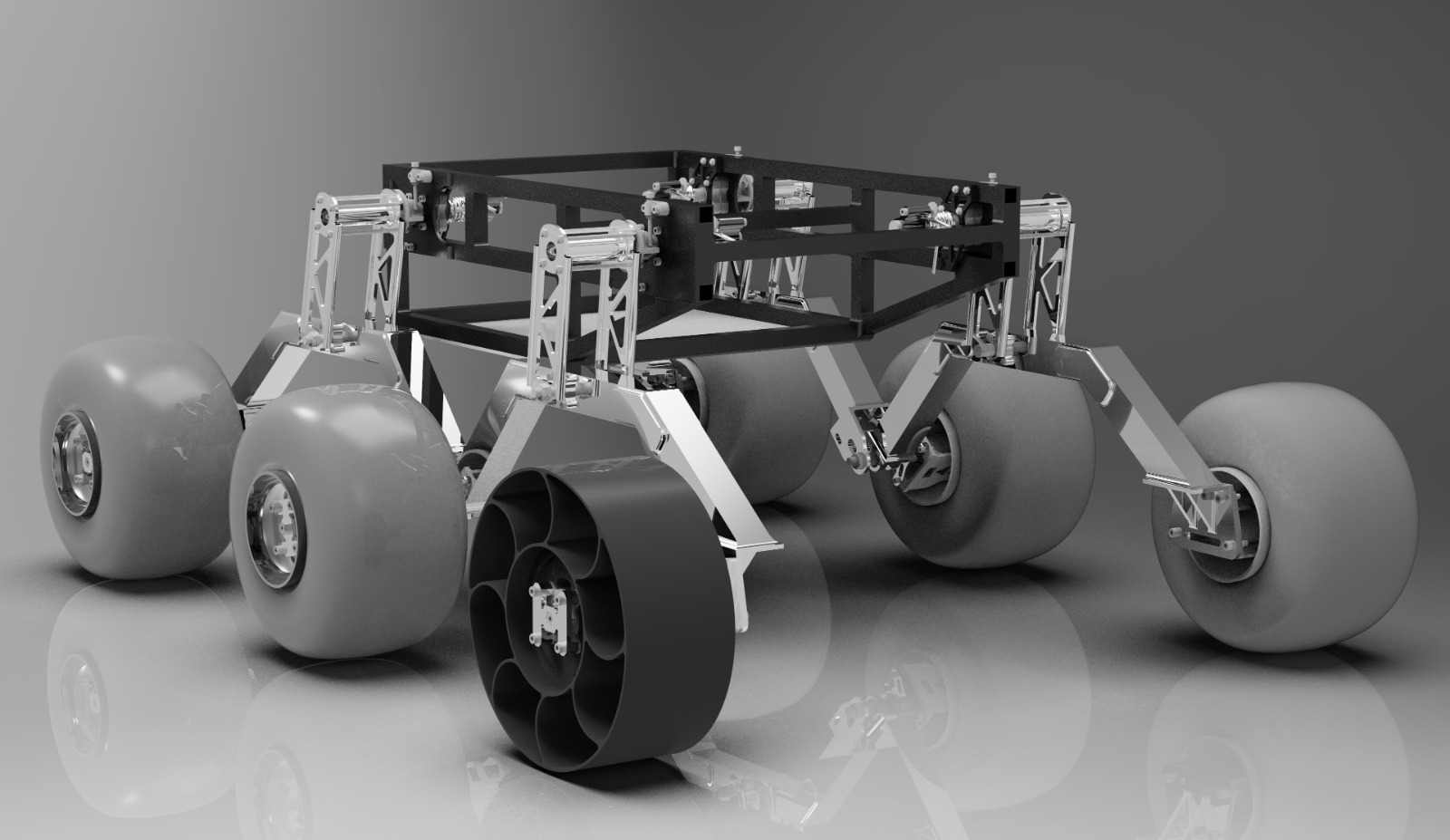
Drive System Reder with a flexible 3D printed Front Wheel




 Skip to content
Skip to content  Optimized by Seraphinite Accelerator
Optimized by Seraphinite Accelerator